




本文经自动驾驶之心公众号授权转载,转载请联系出处。
原标题:ScalableMap: Scalable Map Learning for Online Long-Range Vectorized HD Map Construction
论文链接:https://arxiv.org/pdf/2310.13378.pdf
代码链接:https://github.com/jingy1yu/ScalableMap
作者单位:武汉大学

论文思路:
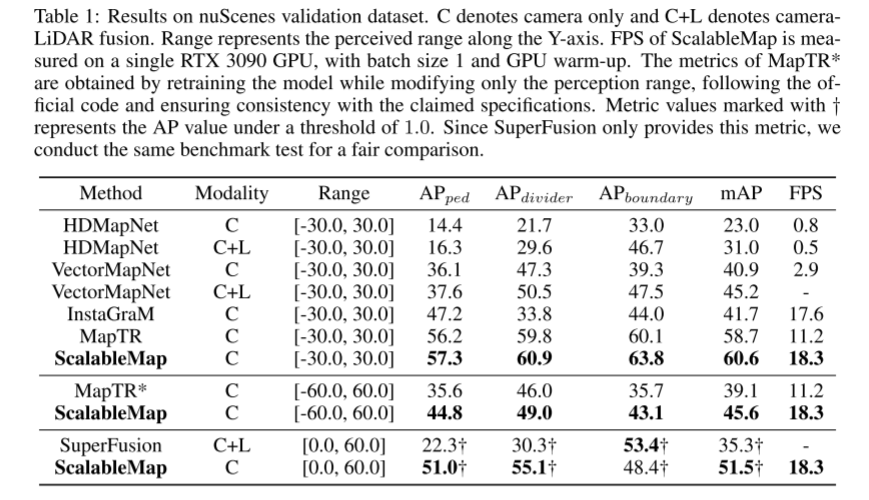
本文提出了一种新颖的端到端 pipeline ,用于使用车载 camera 传感器构建在线远距离矢量化高精(HD)地图。高精地图的矢量化表示,采用折线和多边形来表示地图元素,被下游任务广泛使用。然而,先前参考动态目标检测设计的方案忽略了线性地图元素内的结构约束,导致远距离场景中的性能下降。本文利用地图元素的属性来提高地图构建的性能。本文在线性结构的指导下提取更准确的鸟瞰图(BEV)特征,然后提出一种分层稀疏图表示以进一步利用矢量化图元素的可扩展性,并基于该表示设计渐进式解码机制和监督策略。本文的方法 ScalableMap 在 nuScenes 数据集上展示了卓越的性能,尤其是在远距离场景中,比之前最先进的模型高出 6.5 mAP,同时实现了 18.3 FPS。
主要贡献:
(i) 本文提出了 ScalableMap,第一个端到端远距离矢量化地图构建 pipeline 。本文利用映射元素的结构特性来提取更准确的 BEV 特征,提出基于可扩展矢量化元素的 HSMR,并相应地设计渐进式解码器和监督策略。所有这些都带来了卓越的远距离地图感知。
(ii) 本文通过大量的实验评估了 ScalableMap 在 nuScenes 数据集 [17] 上的性能。本文提出的方法在远距离高精地图学习中取得了最先进的结果,比现有的多模态方法高出 6.5 mAP,同时达到 18.3 FPS。
网络设计:
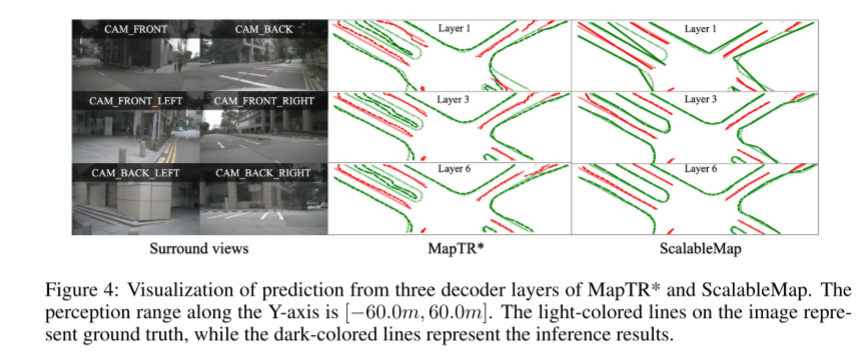
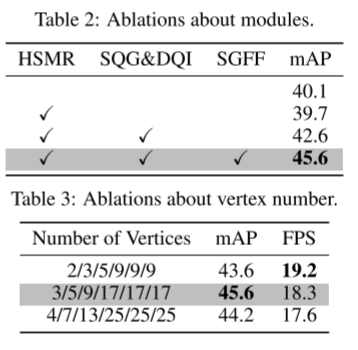
本文的目标是利用矢量化地图元素的结构特性来解决在较长距离内准确检测地图元素的挑战。首先,本文分别通过两个分支提取位置感知的 BEV 特征和实例感知的 BEV 特征,并在线性结构的指导下融合它们,得到混合 BEV 特征。接下来,本文提出了一种分层稀疏地图表示(HSMR),以稀疏但准确的方式抽象地图元素。将此表示与 DETR [16] 提出的级联解码层集成,本文设计了一种渐进解码器,通过利用矢量化映射元素的可扩展性和渐进监督策略来增强结构化信息的约束,以提高推理的准确性。本文的方案 ScalableMap 动态增加地图的采样密度以获得各种比例的推理结果,使本文能够更快地获得更准确的地图信息。

图 1:ScalableMap 概述。(a) 结构引导的混合 BEV 特征提取器。(b) 分层稀疏地图表示和渐进解码器。(c) 渐进式监督。

图 2:渐进折线损失的可视化。
实验结果:

引用:
Yu, J., Zhang, Z., Xia, S., & Sang, J. (2023). ScalableMap: Scalable Map Learning for Online Long-Range Vectorized HD Map Construction. ArXiv. /abs/2310.13378


